
1. Գործադիր ամփոփագրի պատասխան
ԱԹՍ-ի վրա տեղադրված օդերևութաբանական սարքի հիմնական պահանջները ներառում են գերթեթև դիզայն (մինչև 60 գրամ) և ինտեգրված կառուցվածք՝ առանց շարժվող մասերի՝ աերոդինամիկ կայունությունն ու դիմացկունությունն ապահովելու համար: Իդեալական սենսորները պետք է ապահովեն բարձր դիմադրություն էլեկտրամագնիսական միջամտությանը և աջակցեն ստանդարտ արձանագրություններին, ինչպիսին է Modbus RTU-ն՝ թռիչքի կառավարման անխափան ինտեգրման համար: Այս տեխնիկական ճարտարապետությունը թույլ է տալիս իրական ժամանակում մոնիթորինգ իրականացնել շրջակա միջավայրի հինգ հիմնական տարրերի՝ քամու արագության, ուղղության, ջերմաստիճանի, խոնավության և ճնշման՝ առանց վտանգելու ժամանակակից անօդաչու թռչող սարքերի հարթակների թռիչքի դիմացկունությունը:
2. Ներածություն. Իրական ժամանակի օդերևութաբանության կարևոր դերը անօդաչու թռչող սարքերի գործողություններում
Անօդաչու թռչող սարքերի (ԱԹՍ) շահագործման բարձր ռիսկային աշխարհում իրական ժամանակի օդերևութաբանական տվյալները տարբերությունն են հաջող առաքելության և աղետալի կադրերի կորստի միջև: Թռիչքի ընթացքում քամու արագության, ուղղության, ջերմաստիճանի, խոնավության և մթնոլորտային ճնշման չափումը այլևս ընտրովի «լրացուցիչ» բան չէ. այն թռիչքի կայունության, մարտկոցի օպտիմալացման և բեռի ճշգրտության հիմնական պահանջ է:
Honde Technology-ում մենք մշակել ենք մեր սենսորային լուծումները՝ հաղթահարելու անօդաչու թռչող սարքերի հիմնական խոչընդոտները՝ քաշի տատանումները, քամու բարձր դիմադրությունը և ազդանշանի վատթարացումը: Մեխանիկական բաղադրիչները վերացնելով՝ ինտեգրված, պինդ վիճակում գտնվող դիզայնի օգտին, մենք լուծում ենք անխոզանակ DC շարժիչի (BLDC) միջավայրերին բնորոշ բարձր էլեկտրամագնիսական միջամտության (EMI) հետ կապված կոնկրետ մարտահրավերները՝ սահմանելով նոր չափանիշ հեղինակավոր, թռիչքի համար պատրաստ շրջակա միջավայրի տվյալների համար:
3. Հիմնական պարամետրեր. Ինչու են «թեթև» և «փոքր» չափերը անվիճելի
Անօդաչու թռչող սարքերի համակարգերի ինժեներների համար թռչող սարքին ավելացված յուրաքանչյուր գրամը թռիչքի դիմացկունության և մանևրելու ուղղակի հարկ է: Պատմականորեն, ամբողջական օդերևութաբանական համալիրի ինտեգրումը հաճախ պահանջում էր անցնել ավելի մեծ, ավելի թանկ անօդաչու թռչող սարքերի դասի: Honde անօդաչու թռչող սարքի եղանակային գործիքը խախտում է այս փոխզիջումը: Ընդամենը 50 մմ տրամագծով և 55-56 գրամ ընդհանուր քաշով այն ճանաչվում է որպես համաշխարհային շուկայում առկա ամենաթեթև և ամենափոքր գործիքներից մեկը:
Անօդաչու թռչող սարքի թռիչքի կառավարման ինտեգրման հիմնական առավելությունները.
- Ցածր էներգիայի սպառում.Օգտագործելով ներքին ցածր էներգամատակարարման չիպ, սենսորը սպառում է ընդամենը 10 մԱ 5-12 Վ լարման տիրույթում՝ խնայելով ինքնաթիռի էներգաբաշխման տախտակի (PDB) ռեսուրսները։
- Ինտեգրված եռաչափ ուլտրաձայնային կառուցվածք.Ինչպես երևում է մեր մասնագիտացված դիզայնից, երեք զոնդից բաղկացած ուլտրաձայնային ճարտարապետությունը հեռացնում է շարժվող մասերը՝ ապահովելով, որ սարքը դիմադրողական լինի թռիչքի բարձր հաճախականության տատանումներին։
- Էլեկտրամագնիսական Էլեկտրամագնիսական Դիմադրություն.Հատուկ նախագծված է տվյալների ամբողջականությունը պահպանելու համար՝ չնայած բարձր հզորությամբ անօդաչու թռչող սարքերի շարժիչների և ռադիոհեռաչափության կողմից առաջացող զգալի էլեկտրամագնիսական աղմուկին։
- Շրջակա միջավայրի դիմացկունություն.IP վարկանիշով ջրակայուն և փոշեկուլային պատյանը ներառում է պաշտպանիչ ծածկույթի վրա հատուկ ջերմամեկուսիչ մշակում, որը ապահովում է կայուն աշխատանք ծայրահեղ ջերմաստիճանների և թեթև անձրևի պայմաններում։
4. Համեմատական տեխնիկական բնութագրեր
Հետևյալ պարամետրերը ներկայացնում են Honde սարքի հինգ տարրերից բաղկացած կարողությունը, որը կառուցված է թռիչքի կառավարման տրամաբանության և արհեստական բանականության վրա հիմնված մոնիթորինգի համակարգերի կողմից արագ ներծծման համար։
| Պարամետրի անունը | Չափման միջակայք | Ճշգրտություն | Լուծաչափ | Միավոր |
| Քամու արագությունը | 0~50 մ/վրկ | ±0.5 մ/վ (@10 մ/վ) | 0.01 | մ/վ |
| Քամու ուղղություն | 0-359° | ±5° (@10մ/վրկ) | 0.1 | ° |
| Ջերմաստիճան | -20-85℃ | ±0.3℃ (@25℃) | 0.01 | ℃ |
| Խոնավություն | 0-100%RH | ±3%RH (<80%RH) | 0.01 | %RH |
| Օդի ճնշում | 500-1100 հՊա | ±0.5 հՊա | 0.1 | hPa |
| Մուտքային լարում | 5-12 Վ | — | — | VDC |
| Ընթացիկ | 10մԱ | — | — | mA |
5. Ինտեգրացիա և հաղորդակցություն. Modbus RTU-ի օգտագործումը խելացի թռիչքի համար
Ժամանակակից ԱԹՍ ինժեների ինտեգրումը հիմնված է RS485 թվային ինտերֆեյսի և Modbus RTU և ASCII արձանագրությունների ճկունության վրա։
Տեխնիկական խորը ուսումնասիրություն. գրանցամատյանների քարտեզագրում և բանաձևերՏասնվեցական սենսորի ելքային տվյալները թռիչքի գործնական տվյալների վերածելու համար մշակողները պետք է կիրառեն ճիշտ մասշտաբավորման գործակիցներ: Իմ փորձից ելնելով՝ օդի ջերմաստիճանի գրանցամատյանը ամենակարևորն է ճիշտ քարտեզագրման համար.
- 0×0009: Օդի ջերմաստիճան
- Ֆորմուլա՝
Արդյունք = (Տասնվեցական / 100) - 40 - Օրինակ՝0x1B00 (6912) ֆունկցիան հաշվարկում է 29.12℃:
- Ֆորմուլա՝
- 0x000A: Օդի խոնավություն
- Ֆորմուլա՝
Արդյունք = տասնվեցական / 100(օրինակ՝ 0×1603 = 56.35%RH):
- Ֆորմուլա՝
- 0x000B: Մթնոլորտային ճնշում
- Ֆորմուլա՝
Արդյունք = տասնվեցական / 10(օրինակ՝ 0×2784 = 1011.6 հՊա):
- Ֆորմուլա՝
- 0x000C: Քամու արագություն
- Ֆորմուլա՝
Արդյունք = տասնվեցական / 100(օրինակ՝ 0×0125 = 2.93 մ/վրկ):
- Ֆորմուլա՝
- 0x000D: Քամու ուղղություն
- Ֆորմուլա՝
Արդյունք = տասնվեցական / 10(օրինակ՝ 0x0C14 = 309.2°):
- Ֆորմուլա՝
Ընդլայնված կարգավորում. Էլեկտրոնային կողմնացույցԱնօդաչու թռչող սարքերի համար, որտեղ սենսորը կարող է ֆիզիկապես չհամընկնել դրոնի իրական հյուսիսային ուղղության հետ, սենսորը աջակցում է լրացուցիչԷլեկտրոնային կողմնացույց (0×0020)Սա թույլ է տալիս համակարգին արտածել ուղղություն՝ համեմատած հարմարեցված հյուսիսի հետ, ինչը կարևոր է թռիչքի դինամիկ հետագծի ճշգրտումների համար։
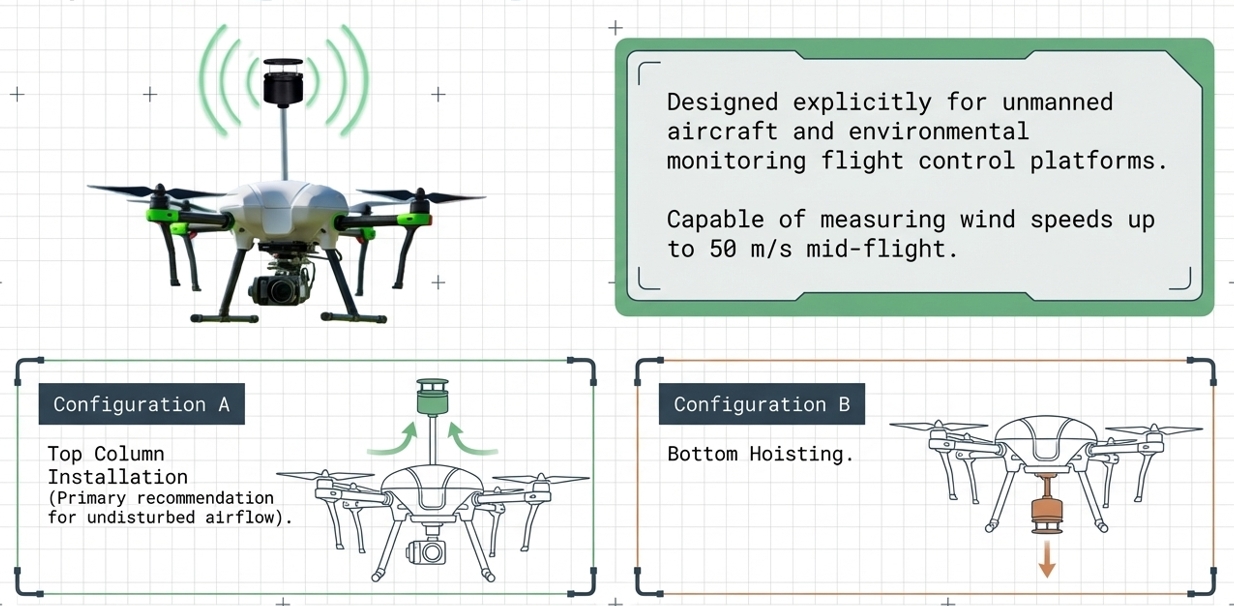
Մոնտաժման տարբերակներ
- Ուղղահայաց վերին սյան տեղադրում՝Խորհուրդ է տրվում մաքուր օդի նմուշառում կատարել պտուտակային լվացման վերևում (օգտագործելով մեր տեխնիկական պատկերներում պատկերված ուղղահայաց կայմը):
- Ստորին մասի բարձրացում՝Իդեալական է ծանր բեռնամբարձման հարթակների համար, որտեղ սենսորը գործում է որպես կապված կամ ներքևից կախված շրջակա միջավայրի զոնդ։
6. Ճարտարագիտական լավագույն փորձը. տարածված թակարդներից խուսափելը
B2B արդյունաբերական հաճախորդների համար այս թռիչքային կույտերը կարգավորելու իմ փորձից ելնելով՝ մի քանի նուրբ արձանագրության մանրամասներ կարող են կամ բարձրացնել, կամ խաթարել համակարգի հուսալիությունը.
- Հարգեք 1S հարցման ցիկլը.Ներքին մշակումը ժամանակ է պահանջում հինգ տվյալների կետերը կայունացնելու համար: Մենք պարզել ենք, որ ձեր հոսթինգային ծրագրաշարում հարցման նվազագույն 1S/ժամանակ ցիկլը անտեսելը հանգեցնում է անկայուն տվյալների հոսքերի և բուֆերի արտահոսքի:
- Լուռ սխալների մշակում.Սա կարևոր «ներքին» խորհուրդ է՝ սենսորըսխալի կոդ չի վերադարձնումCRC16 ստուգման սխալների կամ սխալ հրամանների համար: Եթե ձեր համակարգը պատասխան չի ստանում որոշակի ժամանակահատվածում200 մվ, դուք պետք է ծրագրավորեք ձեր դրայվերը հրամանը ավտոմատ կերպով վերուղարկելու համար։
- Գրանցման սահմանային ստուգումներ.Համոզվեք, որ ձեր հարցման հրամանները չեն պահանջում նշված միջակայքից դուրս գտնվող գրանցամատյանների հասցեներ: Սենսորի ելքային ազդանշանը դառնում է անկանխատեսելի, եթե հարցում է կատարվում գոյություն չունեցող գրանցամատյանների համար:
7. Եզրակացություն և առևտրային կոչ գործողության
ՀոնդեԱԹՍ-ի վրա տեղադրված եղանակային գործիքԱռաջարկում է համապարփակ հինգ տարրերից բաղկացած օդերևութաբանական հավաքածու՝ մեկ 56 գրամանոց փաթեթում: Ցածր հզորության և բարձր էլեկտրամագնիսական ինհիբիցիոն դիմադրության օպտիմալացման միջոցով այն ապահովում է «գետնի վրա ճշգրիտ» տվյալներ, որոնք անհրաժեշտ են անօդաչու թռչող սարքերի ճշգրիտ շահագործման համար՝ առանց հին սարքավորումների աերոդինամիկ կամ քաշային տատանումների:


- Պատվիրեք ձեր շրջակա միջավայրի մոնիթորինգի նախագծի համար անհատական գնանշում։
Ընկերության անվանումը՝«Հոնդե Թեքնոլոջի» ՍՊԸԿայք՝ www.hondetechco.com Էլ․ հասցե՝ info@hondetech.com
Հրապարակման ժամանակը. Ապրիլ-08-2026